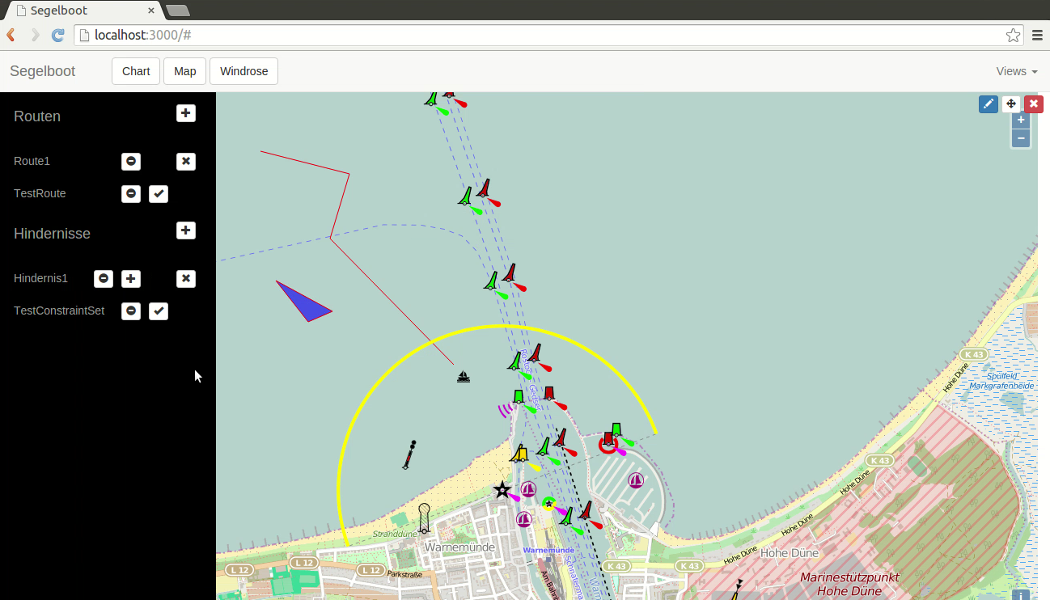
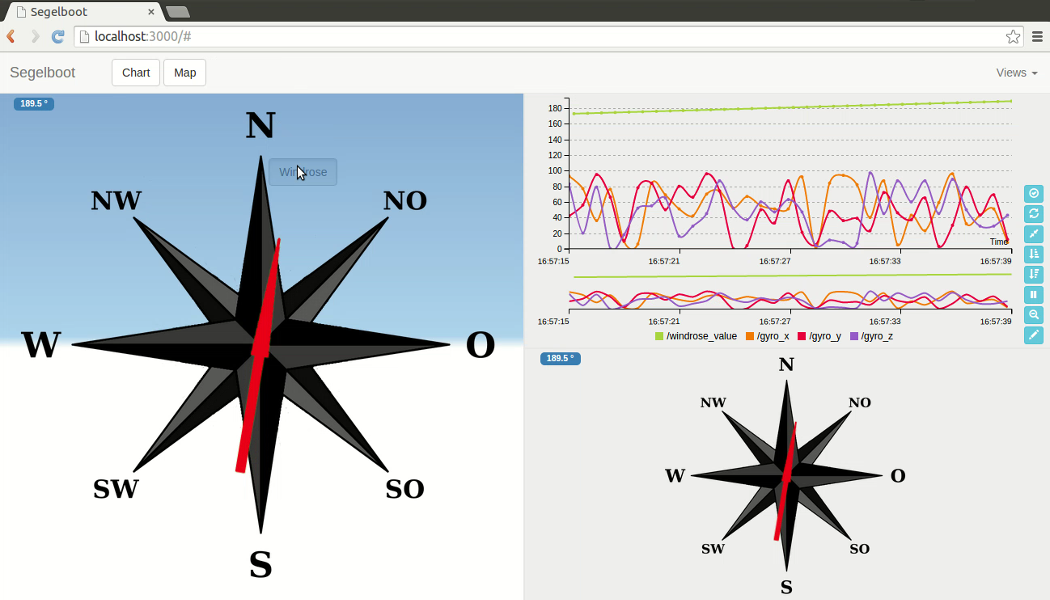
Im letzten Sommersemester haben vier Informatik-Studenten im Rahmen ihres Bachelorpraktikums für uns eine neue, stark verbesserte Version der graphischen Kontrolloberfläche für unser Boot entwickelt. Dank moderner Webtechnologien kann auf diese neue Version ganz einfach per Webbrowser zugegriffen und Kontrollelemente können dynamisch angeordnet werden. Die Bootsdaten werden über eine ROS-Schnittstelle (Robot Operating System) an die Oberfläche übermittelt und können dort auf verschiedene Weise angezeigt werden. Durch den modularen Aufbau können wir später leicht neu Anzeigeelemente hinzufügen.
Vielen Dank an die fleißigen Studenten und an das Fachgebiet Graphisch-Interaktive Systeme für die Durchführung des Praktikums! Wir freuen uns schon jetzt darauf, die Fahrt unseres Bootes im Browser verfolgen zu können.